- Товары и услуги
- Бізнес і промисловість
- Діти та немовлята
- Для дорослих
- Дім і сад
- Здоров'я та краса
- Зоотовари
- Ігри та іграшки
- Мистецтво та розваги
- Меблі
- Обладнання
- Одяг та аксесуари
- Офісне приладдя
- Спортивне обладнання
- Сумки, рюкзаки та аксесуари для багажу
- Транспортні засоби та запчастини
- Фотоапарати, відеокамери й оптика
- Електроніка
- Товари для хатніх тварин
- Другой
- ДАТЧИКИ
- Декор для дому
- Деревина та композити
- Здоров'я й добробут
- Інструменти
- Кухня
- Матеріали для будівництва та оздоблення
- Меблі
- Меблева фурнітура
- Підлогові покриття
- Відкритий сайт
- опалення, вентиляція й охолодження
- Очищення
- Спортивна та відкрита зона
- Прикраси для вікон
- Пристрої
- Зберігання й організація
- Ванна кімната
- Музичні інструменти
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- КИБЕРБЕЗОПАСНОСТЬ
- Книги и курсы по электронике
- МАЛИНОВЫЙ ПИ
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- О нас
- Отзывы






A4988 Чорний - Драйвер крокового двигуна RepRap 35V/2A - Pololu 2128
986 ₴
Показати оптові ціни- В наявності
- Оптом і в роздріб
- Код: 2299354190

Опис продукту: A4988 Чорний - Драйвер крокового двигуна RepRap 35V/2A - Pololu 2128
Система дозволяє керувати кроковим двигуном за допомогою пристрою, який генерує логічні стани, такого як Arduino, STM32 Disco, Raspberry Pi або будь-який мікроконтролер. Модуль Pololu дуже простий у використанні. Щоб повернути двигун на один крок, подайте високий стан (логічну одиницю) на контакт STEP; інша послідовність нулів та одиниць перемістить двигун на ще один крок і так далі. Напрямок вибирається шляхом подачі відповідного стану на контакт DIR (наприклад, низький стан - обертання за годинниковою стрілкою, низький стан - проти годинникової стрілки). Контролер також дозволяє вибирати режим роботи двигуна.
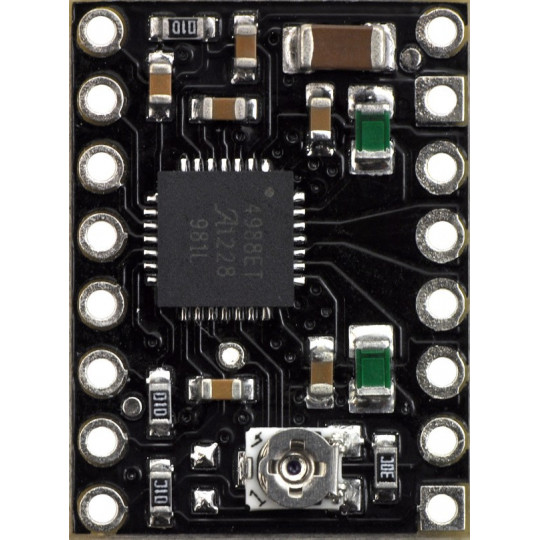
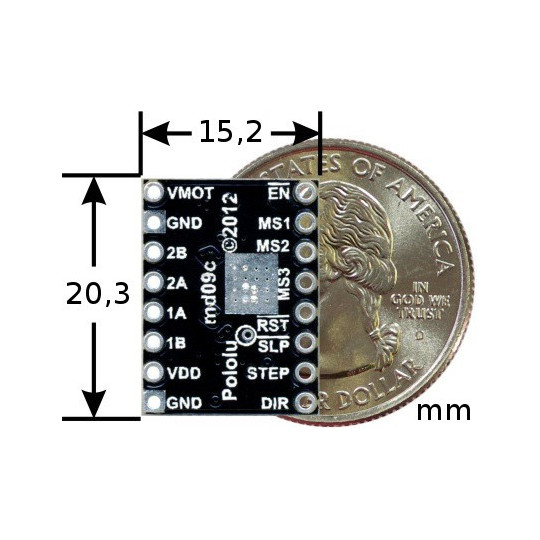
На відміну від зеленого модуля A4988, чорна плата виготовлена з використанням чотиришарової технології, що забезпечує ефективніше розсіювання тепла. Це дозволяє модулю видавати 1,2 А на котушку без потреби в радіаторі. |
На рисунку показано мінімальне підключення контролера. Вивід RESET за замовчуванням не підключений; для запуску системи на нього має бути встановлений високий рівень сигналу. Цього можна досягти, підключивши його до сусіднього виводу SLEEP.
Підключення контролера крокового двигуна
Для керування біполярним кроковим двигуном підключіть систему, як показано на малюнку нижче. Для керування уніполярним двигуном зверніться до інструкції. Якщо номінальна напруга двигуна нижча за необхідну напругу живлення контролера (8 В), відрегулюйте напругу вручну за допомогою потенціометра.
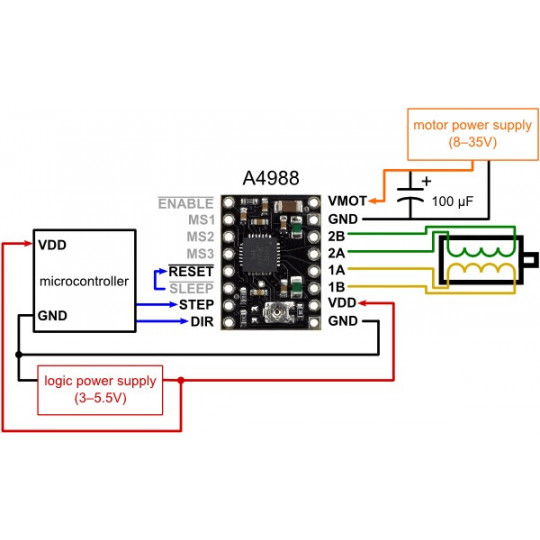
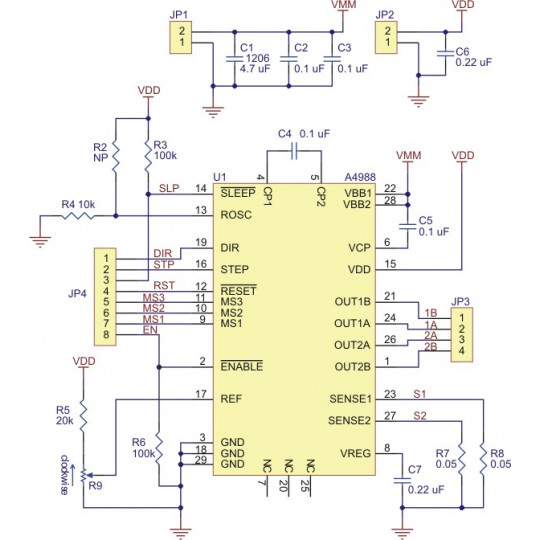
Блок живлення драйвера крокового двигуна
Для живлення логічної частини модуля потрібна напруга в діапазоні від 3 В до 5,5 В, яку слід подавати на вивід VDDНапруга живлення двигуна в діапазоні від 8 В до 35 В подається на контакт VMOT. Система може керувати двигунами з номінальною напругою нижчою за необхідні 8 В. Для цього максимальне споживання струму необхідно встановити за допомогою потенціометра, щоб не перевищувати допустиму потужність двигуна.
Увага! Підключення та відключення двигуна, коли контролер увімкнений, може пошкодити систему. |
Роздільна здатність контролера RepRap 35V/2A
Розмір кроку вибирається за допомогою вхідних данихMS1,MS2,MS3Можливі налаштування наведено в таблиці нижче. Входи MS1, MS2 та MS3 мають внутрішній підтягувальний резистор (100 кОм).
| MS1 | MS2 | MS3 | Роздільна здатність |
| короткий | короткий | короткий | Повний крок |
| високий | короткий | короткий | 1/2 кроку |
| короткий | високий | короткий | 1/4 кроку |
| високий | високий | короткий | 1/8 кроку |
| високий | високий | високий | 1/16 кроку |
Інші входи
Один імпульс, поданий на висновок STEP, змушує двигун рухатися на один крок у вибраному напрямку шляхом подачі відповідного логічного стану на висновок DIR. Виводи STEP та DIR внутрішньо не підтягуються. Якщо двигун має обертатися лише в одному напрямку, висновок DIR можна постійно підключити до VCC або GND.
Система також має три входи для керування споживанням енергії: RESET, SLP та EN; їхні описи можна знайти в документації. Зверніть увагу, що контакт RESET ні до чого не підключений. Якщо він не використовується, його можна підключити до сусіднього контакту SLEEP.
Обмеження струму
Модуль A4988 дозволяє активне обмеження струму за допомогою потенціометра. Один зі способів реалізації цього обмеження – встановити контролер у режим повного кроку та виміряти струм, що протікає через одну котушку, без подачі сигналу на вхід STEP. Виміряний струм становить 70% від встановленого ліміту (обидві котушки завжди увімкнені та обмежені 70% у режимі повного кроку). Інший метод – виміряти напругу на виводі REF (позначено кружечком на друкованій платі) та розрахувати ліміт струму (вимірювальні резистори мають опір 0,05 Ом). Для отримання додаткової інформації зверніться до документації A4988.
Розсіювання тепла
Плата розроблена для розсіювання тепла при споживанні струму приблизно 1,2 А на котушку. Якщо споживаний струм значно вищий, слід використовувати зовнішній радіатор, який можна кріпити за допомогою теплопровідного клею.
Технічні характеристики драйвера крокового двигуна Pololu 2128
- Напруга живлення двигуна: 8 В - 35 В
- Чотиришарова друкована плата
- Струм: макс. 1,2 А на котушку (при силі струму до 2 А)
- Простий інтерфейс керування
- Працює в 5 різних режимах: повний крок, 1/2, 1/4, 1/8 та 1/16 кроку
- Можливість регулювання струму, споживаного двигуном, за допомогою потенціометра
- Захист від перегріву системи
- Модуль повністю сумісний зі своїм попередником: A4983
Комплект включає:
- Модуль драйвера крокового двигуна A4988
- Смужка Золотих шпильок - 1x16

| Основні атрибути | |
|---|---|
| Виробник | Arduino |
| Користувальницькі характеристики | |
| Вага паковання | 0,003 кг |
| Висота паковання | 0,3 см |
| Ширина паковання | 8 см |
| глибина паковання | 8,5 см |
- Ціна: 986 ₴