- Товары и услуги
- Бізнес і промисловість
- Діти та немовлята
- Для дорослих
- Дім і сад
- Здоров'я та краса
- Зоотовари
- Ігри та іграшки
- Мистецтво та розваги
- Меблі
- Обладнання
- Одяг та аксесуари
- Офісне приладдя
- Спортивне обладнання
- Сумки, рюкзаки та аксесуари для багажу
- Транспортні засоби та запчастини
- Фотоапарати, відеокамери й оптика
- Електроніка
- Товари для хатніх тварин
- Другой
- ДАТЧИКИ
- Декор для дому
- Деревина та композити
- Здоров'я й добробут
- Інструменти
- Кухня
- Матеріали для будівництва та оздоблення
- Меблі
- Меблева фурнітура
- Підлогові покриття
- Відкритий сайт
- опалення, вентиляція й охолодження
- Очищення
- Спортивна та відкрита зона
- Прикраси для вікон
- Пристрої
- Зберігання й організація
- Ванна кімната
- Музичні інструменти
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- КИБЕРБЕЗОПАСНОСТЬ
- Книги и курсы по электронике
- МАЛИНОВЫЙ ПИ
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- О нас
- Отзывы






TB67S249FTG - драйвер крокового двигуна 47V/1.6A - з роз'ємами - Pololu 3097
1 331 ₴
Показати оптові ціни- В наявності
- Оптом і в роздріб
- Код: 3230000161
Опис TB67S249FTG - Драйвер крокового двигуна 47V/1.6A - з роз'ємами - Pololu 3097
Система дозволяє керувати кроковим двигуном за допомогою пристрою, який дозволяє генерувати логічні стани, наприкладАрдуїно,STM32Discovoery,Raspberry Piабо будь-якиймікроконтролерМодуль Pololu дуже простий у використанні. Наростаючий фронт кожного імпульсу на виводі CLK (STEP) відповідає одному кроку. Напрямок вибирається шляхом подачі відповідного стану на вивід CW/CCW (DIR) (наприклад, низький стан - обертання за годинниковою стрілкою, високий стан - проти годинникової стрілки). Контролер також дозволяє вибирати робочу роздільну здатність двигуна.
Модуль має припаяні роз'єми із золотими контактами.
Ми також пропонуємо версію без встановлених роз'ємів.
TB67S249FTG - драйвер крокового двигуна 47V / 1.6A - з роз'ємами - Pololu 3097.
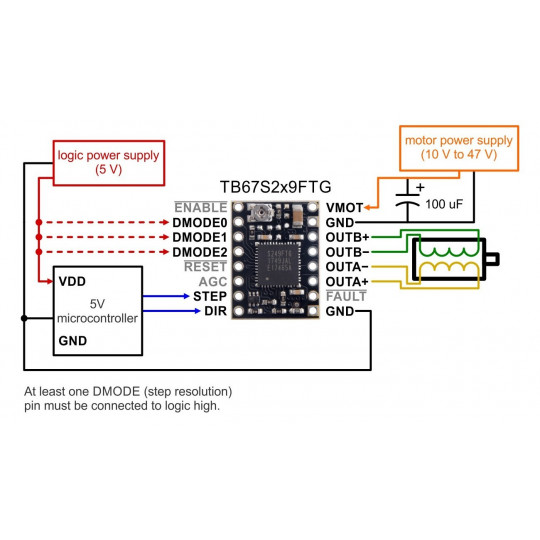
Мінімальна схема підключення мікроконтролера до TB67S2x9FTG.
Контролер потребує напруги живлення від 10 В до 47 В, яка буде підключена до контактів VIN та GND.
Підключення контролера
Для керування біполярним кроковим двигуном підключіть систему, як показано на малюнку нижче.
Блок живлення
Для живлення логічної частини модуля потрібна напруга 5 В, яку необхідно подати на вивід VDDНапруга живлення двигуна в діапазоні від 10 В до 47 В подається на контакт VIN-код.
Увага!
Підключення та відключення двигуна, коли контролер увімкнений, може пошкодити систему.
Роздільна здатність
Розмір кроку вибирається за допомогою входів DMODE0, DMODE1 та DMODE2. Можливі налаштування наведено в таблиці нижче. Входи MS1, MS2 та MS3 мають внутрішній підтягувальний резистор (100 кОм).
| MS1 | MS2 | MS3 | Роздільна здатність |
| короткий | короткий | короткий | Режим очікування |
| короткий | короткий | високий | Повний крок |
| короткий | високий | короткий | некруглий півкрок ("а") |
| короткий | високий | високий | 1/4 кроку |
| високий | короткий | короткий | круговий півкрок ("b") |
| високий | короткий | високий | 1/8 кроку |
| високий | високий | короткий | 1/16 кроку |
| високий | високий | високий | 1/32 крок |
КОНТРОЛЬ.
Контроль TB67S249FTG - Pololu 3097
Наростаючий фронт кожного імпульсу на виводі CLK (STEP) відповідає одному кроку. Напрямок вибирається шляхом подачі відповідного стану до виводу CW/CCW (DIR) (наприклад, низький стан - обертання за годинниковою стрілкою, високий стан - проти годинникової стрілки). Якщо двигун має обертатися лише в одному напрямку, вивід DIR можна залишити непідключеним.
Коли на виводі RESET переходить у високий рівень, контролер скидає свій стан у таблиці транслятора, що призводить до початкового значення 45°. Це відповідає 100% граничного значення струму на обох котушках у режимах повного кроку та некругового півкроку. Вивід RESET не вимикає виходи двигуна; контролер продовжуватиме подавати струм на двигун, але не надаватиме інформацію на вихід CLK.
TB67S2x9FTG може виявляти кілька помилок, про які повідомляє, що призводять до низького рівня на одному або обох виводах LO. Виробник включив...
Детальний опис кожного піна можна знайти за адресою
Технічні характеристики драйвера крокового двигуна TB67S249FTG
- Напруга живлення двигуна: від 10 В до 47 В
- Струм: 1,6 А безперервний на котушку (до 4,5 А короткочасний)
- Напруга живлення логічної частини: від 2 В до 5,5 В
- Працює в 4 різних режимах: повний крок, 1/2, 1/4, 1/8, 1/16 або 1/32
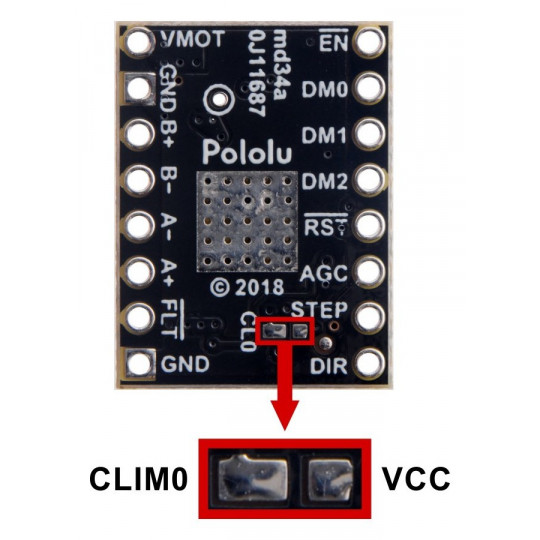
- Обмеження струму за допомогою потенціометра
- Захист від перегріву системи
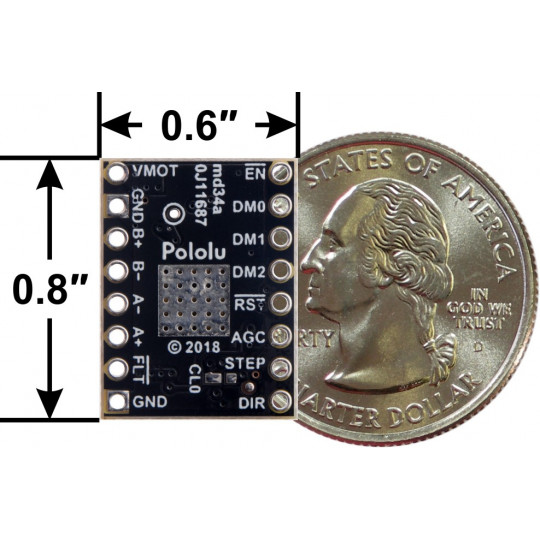
- Розміри модуля: 20 x 15 мм
Розміри контролера.

| Основні атрибути | |
|---|---|
| Виробник | Arduino |
| Користувальницькі характеристики | |
| Вага паковання | 0,004 кг |
| Висота паковання | 1 см |
| Кількість каналів | 1 |
| Напруга живлення від | 10,0 В |
| Подавайте напругу на | 47,0 В |
| Поточна ефективність | 1,5 А |
| Ширина паковання | 8 см |
| глибина паковання | 7 см |
- Ціна: 1 331 ₴