- Товары и услуги
- Бизнес и промышленность
- Дети и младенцы
- Для взрослых
- Дом и сад
- Здоровье и красота
- Зоотовары
- Игры и игрушки
- Искусство и развлечения
- Мебель
- Оборудование
- Одежда и аксессуары
- Офисные принадлежности
- Спортивное оборудование
- Сумки, рюкзаки и аксессуары для багажа
- Транспортные средства и запчасти
- Фотоаппараты, видеокамеры и оптика
- Электроника
- Товары для домашних животных
- Другой
- ДАТЧИКИ
- Декор для дома
- Древесина и композиты
- Здоровье и благополучие
- Инструменты
- Кухня
- Материалы для строительства и отделки
- Мебель
- Мебельная фурнитура
- Напольные покрытия
- Открытый сайт
- Отопление, вентиляция и охлаждение
- Очистка
- Спортивная и открытая зона
- Украшения для окон
- Устройства
- Хранение и организация
- Ванная комната
- Музыкальные инструменты
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- КИБЕРБЕЗОПАСНОСТЬ
- Книги и курсы по электронике
- МАЛИНОВЫЙ ПИ
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- О нас
- Отзывы







MP6500 — контроллер шагового двигателя 35 В/2,5 А с аналоговой регулировкой тока — в собранном виде — Pololu 2967
887 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: 3648988507
Описание товара: MP6500 — контроллер шагового двигателя 35 В/2,5 А — с аналоговой регулировкой тока — в собранном виде — Pololu 2967
Система позволяет управлять шаговым двигателем с помощью устройства, генерирующего логические состояния, такого как Arduino, STM32Discovoery, Raspberry Pi или любой другой микроконтроллер. Модуль Pololu очень прост в использовании. Для поворота двигателя на один шаг подайте высокий уровень (логическую единицу) на вывод STEP; другая последовательность нулей и единиц переместит двигатель на следующий шаг и так далее. Направление выбирается подачей соответствующего состояния на вывод DIR (например, низкий уровень — вращение по часовой стрелке, высокий уровень — против часовой стрелки). Контроллер также позволяет выбирать разрешение работы двигателя.
Технические характеристики контроллера
- Напряжение питания двигателя: от 4,5 В до 35 В.
- Максимальный ток: 1,8 А на катушку (с охлаждением до 2,5 А).
- Напряжение питания логических компонентов: от 3,3 В до 5 В.
- Простой интерфейс управления
- Работает в 4 различных режимах: полный шаг, 1/2, 1/4 и 1/8.
- Возможность регулировки потребляемого двигателем тока с помощью потенциометра.
- Защита от перегрева системы
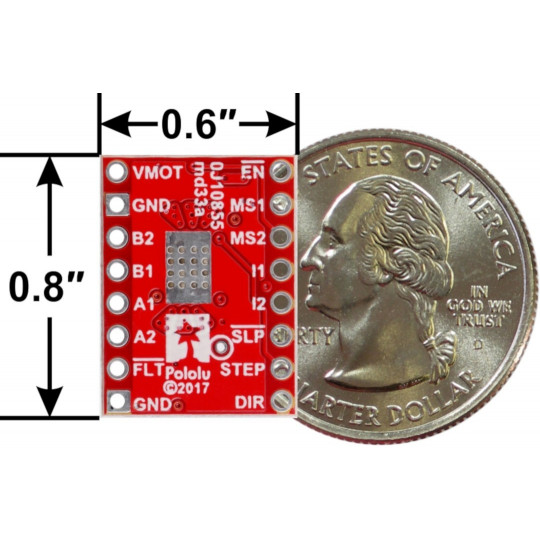
- Размеры модуля: 20 x 15 мм
Модуль оснащен припаянными позолоченными контактами. Мы также предлагаем версию без установленных разъемов. |
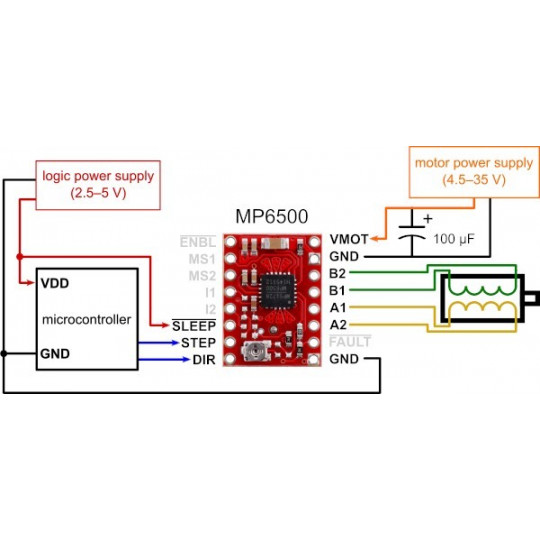
Подключение контроллера
Для управления биполярным шаговым двигателем подключите систему, как показано на рисунке ниже. Для управления униполярным двигателем обратитесь к руководству. Если номинальное напряжение двигателя ниже требуемого напряжения питания контроллера (4,5 В), ограничение тока необходимо установить вручную с помощью потенциометра.
На чертеже показана минимальная схема подключения контроллера. Между выводом питания двигателя и землей следует установить резистор емкостью +/- 100 мкФ.
Блок питания MP6500
Для питания логической части модуля требуется напряжение в диапазоне от 2,5 В до 5 В, которое должно подаваться на соответствующий вывод.СпатьНа вывод подается напряжение питания двигателя в диапазоне от 4,5 В до 35 В. ВМОТ.Система может управлять двигателями с номинальным напряжением ниже требуемых 4,5 В. Для этого необходимо ограничить максимальный потребляемый ток, чтобы он не превышал допустимый ток двигателя. Например, для двигателя с сопротивлением обмотки 5 Ом и потребляемым током 1 А номинальное напряжение питания составляет 5 В. При подаче напряжения 12 В ток следует ограничить, чтобы он не превышал 1 А.
Внимание! Подключение и отключение двигателя при включенном контроллере может повредить систему. |
Разрешение и шаг
Шаг выбора определяется с помощью входных данных.МС1, МС2Возможные настройки показаны в таблице ниже. Входы MS1 и MS2 имеют внутренний подтягивающий резистор (500 кОм).Ω).
| МС1 | МС2 | Разрешение |
| короткий | короткий | Полный шаг |
| высокий | короткий | 1/2 шага |
| короткий | высокий | 1/4 шага |
| высокий | высокий | шаг 1/8 |
Другие входы
Один импульс, поданный на вывод STEP, заставляет двигатель переместиться на один шаг в направлении, выбранном путем подачи соответствующего логического состояния на вывод DIR. Если двигатель должен вращаться только в одном направлении, вывод DIR можно оставить отключенным.
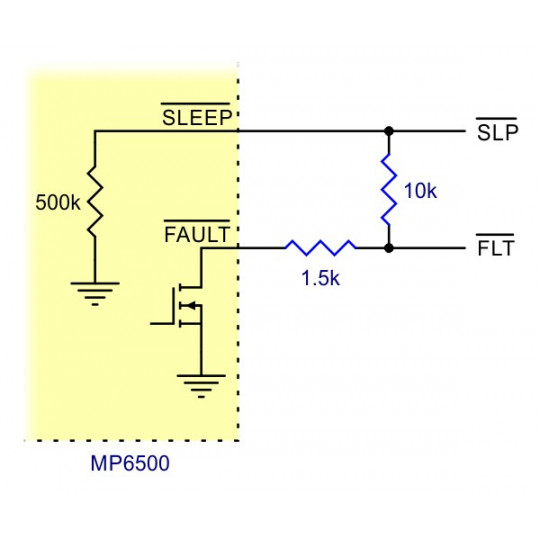
Система имеет два разных входа для управления питанием: SLEEP и ENBL, их описание можно найти в документации.Обратите внимание, что контроллер подтягивает оба этих вывода через внутренние резисторы подтяжки 500 кОм. По умолчанию состояние SLEEP предотвращает работу двигателя; он должен быть подключен к высокому уровню (его можно подключить напрямую к источнику логического напряжения 2,5–5 В или управлять им, подключив к цифровому выходу микроконтроллера). Состояние ENBL по умолчанию включает контроллер; его можно отключить.
Выход FAULT отключается, когда мосты F и H деактивируются из-за защиты от перегрузки по току, перенапряжения, перегрева или пониженного напряжения. Он подключается к выводу SLEEP через резистор 10 кОм.Ω, который работает аналогично FAULT. Когда SLEEP имеет высокий уровень, соединение FAULT не требуется.
Внимание! В результате соединения выводов SLEEP и FAULT и возникновения неисправности напряжение на выводе SLEEP может упасть ниже 2,1 В, если оно недостаточно усилено. Рекомендуется использовать резистор с минимальным сопротивлением 4,7 Ом.кОм с помощью этого вывода или подключите SLEEP напрямую к VCC. |
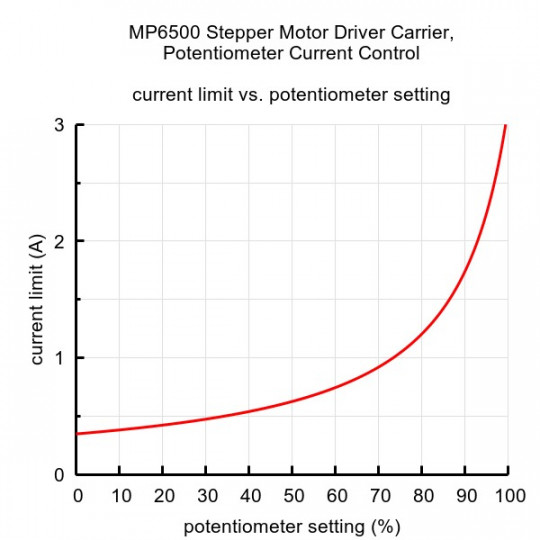
Текущий предел
Система может управлять двигателями с номинальным напряжением ниже требуемых 4,5 В. Для этого,ограничитьМаксимально допустимый ток потребления определяется с помощью потенциометра, чтобы не превышать допустимый ток двигателя. Например, для двигателя с сопротивлением 5 Ом на обмотку и потребляемым током 1 А номинальное напряжение питания составляет 5 В. При подаче напряжения 12 В ток следует ограничивать так, чтобы он не превышал 1 А.
Модуль MP6500 позволяет осуществлять активное ограничение тока с помощью потенциометра. Один из способов реализации ограничения — установить контроллер в полношаговый режим и измерить ток, протекающий через одну катушку, не подавая сигнал на вход STEP. Измеренный ток составляет 70% от установленного предела (обе катушки всегда включены и ограничены 70% в полношаговом режиме). Другой метод — измерить напряжение на выводе VREF (отмечен кружком на печатной плате) и рассчитать ограничение тока (измерительные резисторы имеют сопротивление 0,05 Ом). Подробнее см. вдокументация по системе MP6500.
Тепловыделение
Плата рассчитана на рассеивание тепла при потреблении тока приблизительно 1,8 А на катушку. Если ток значительно выше, следует использовать внешний радиатор, который можно закрепить с помощью теплопроводящего клея.
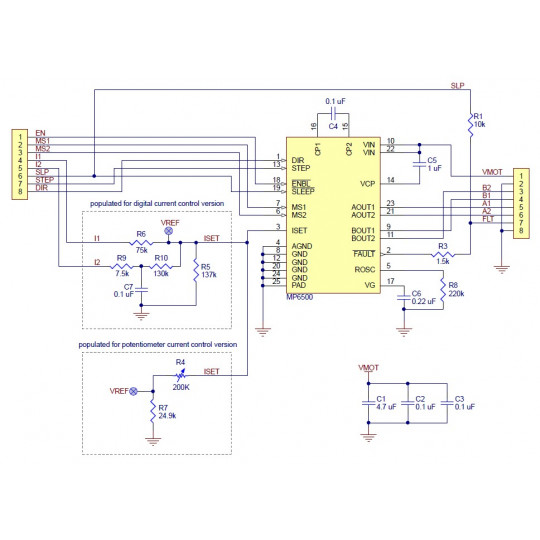
Схема системы
Система содержит необходимые пассивные компоненты для корректной работы.контроллер. Схема подключения представлена на рисунках ниже.

| Основные атрибуты | |
|---|---|
| Производитель | Arduino |
| Тип | Контроллер |
| Пользовательские характеристики | |
| Вес упаковки | 0,001 кг |
| Высота упаковки | 1,1 см |
| Количество каналов | 1 |
| Напряжение питания от | 4,5 В |
| Подавайте напряжение на | 35,0 В |
| Текущая эффективность | 2 А |
| Ширина упаковки | 8,5 см |
| глубина упаковки | 7 см |
- Цена: 887 ₴