- Товары и услуги
- Бизнес и промышленность
- Дети и младенцы
- Для взрослых
- Дом и сад
- Здоровье и красота
- Зоотовары
- Игры и игрушки
- Искусство и развлечения
- Мебель
- Оборудование
- Одежда и аксессуары
- Офисные принадлежности
- Спортивное оборудование
- Сумки, рюкзаки и аксессуары для багажа
- Транспортные средства и запчасти
- Фотоаппараты, видеокамеры и оптика
- Электроника
- Товары для домашних животных
- Другой
- ДАТЧИКИ
- Декор для дома
- Древесина и композиты
- Здоровье и благополучие
- Инструменты
- Кухня
- Материалы для строительства и отделки
- Мебель
- Мебельная фурнитура
- Напольные покрытия
- Открытый сайт
- Отопление, вентиляция и охлаждение
- Очистка
- Спортивная и открытая зона
- Украшения для окон
- Устройства
- Хранение и организация
- Ванная комната
- Музыкальные инструменты
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- КИБЕРБЕЗОПАСНОСТЬ
- Книги и курсы по электронике
- МАЛИНОВЫЙ ПИ
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- О нас
- Отзывы










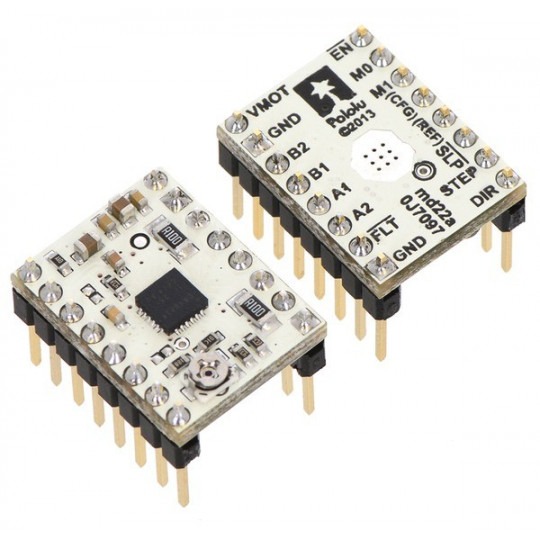
Низковольтный драйвер шагового двигателя DRV8834 10,8 В 2 А - Pololu 2134
862 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: 2339496463
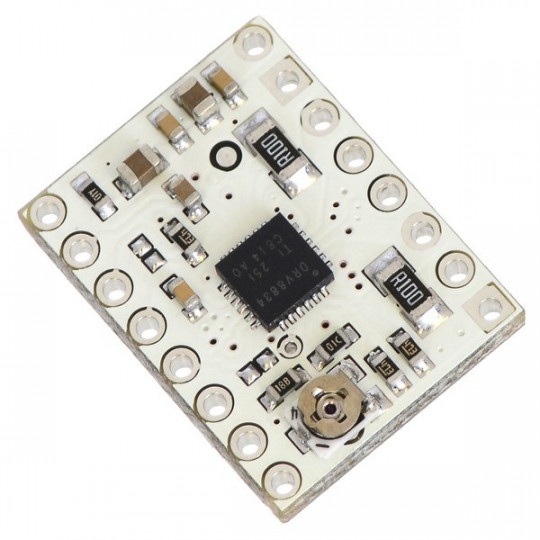
Описание товара: Низковольтный драйвер шагового двигателя DRV8834, 10,8 В, 2 А
Модуль на базе контроллера DRV8834 от Texas Instruments позволяет управлять шаговым двигателем с максимальным потреблением тока до 2 А на обмотку, питаемым от напряжения в диапазоне от 2,5 В до 10,8 В. Перед использованием рекомендуется ознакомиться с документацией к контроллеру.
Ниже перечислены некоторые из основных характеристик продукта:
- Модуль имеет простой интерфейс управления шагом и направлением.
- Он может работать в шести режимах: полный, половинный, 1/4, 1/8, 1/16 и 1/32 шага.
- Обеспечивает регулировку максимального тока двигателя с помощью потенциометра, что позволяет использовать напряжение питания выше номинального напряжения двигателя, тем самым достигая более высоких скоростей шагового движения.
- Двигатели могут питаться от напряжения от 2,5 В до 10,8 В.
- Потребляемый ток до 2 А на катушку (1,5 А в непрерывном режиме).
- Благодаря встроенному стабилизатору напряжения пользователю не требуется подавать дополнительное питание на логический блок.
- Микросхема DRV8834 работает с системами, имеющими логическое напряжение 3,3 В и 5 В.
- Она имеет защиту от чрезмерного тока, перегрева и короткого замыкания, а также систему блокировки запуска при слишком низком напряжении питания.
- Для увеличения площади теплоотводящей поверхности плата была изготовлена по четырехслойной технологии с более толстым медным покрытием.
- Открытая площадка заземления на нижней стороне позволяет припаивать компоненты системы охлаждения.
- Модуль совместим по размеру и расположению контактов с системой на базе контроллера A4988.
Низковольтный драйвер шагового двигателя DRV8834 10,8 В 2 А - Pololu 2134.
В нашем предложении также представлены драйверы для шаговых двигателей с другими рабочими параметрами.
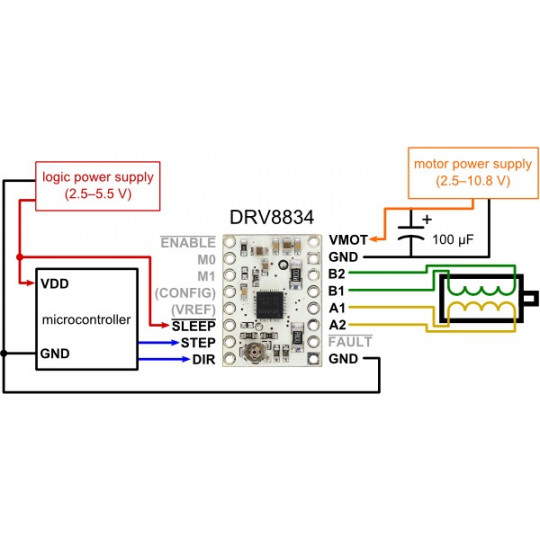
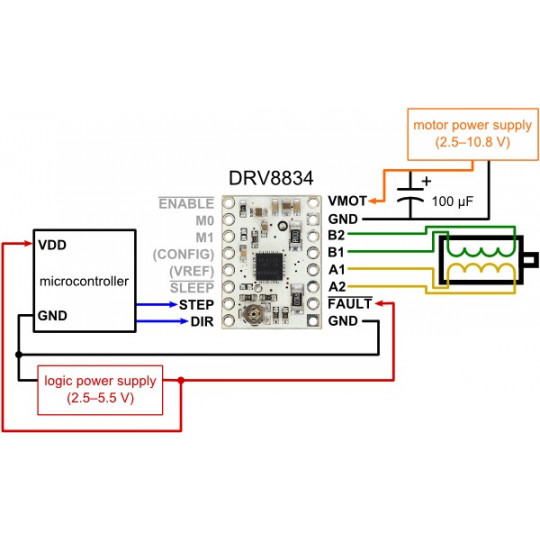
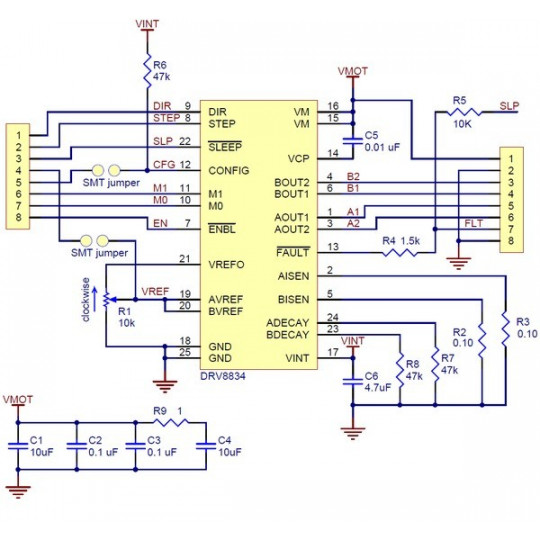
Подключение контроллера
Для управления биполярным шаговым двигателем подключите систему, как показано на рисунке ниже. Контроллер также позволяет работать с некоторыми униполярными двигателями — подробности можно найти в руководстве.
Управление контроллером
Один импульс, подаваемый на вывод STEP, заставляет двигатель сделать один шаг в направлении, выбранном путем подачи соответствующего логического состояния (высокий или низкий уровень) на вывод DIR. Выводы STEP и DIR внутренне подтянуты к земле (GND) через резистор 200 кОм. Если двигатель должен вращаться только в одном направлении, вывод DIR можно оставить неподключенным.
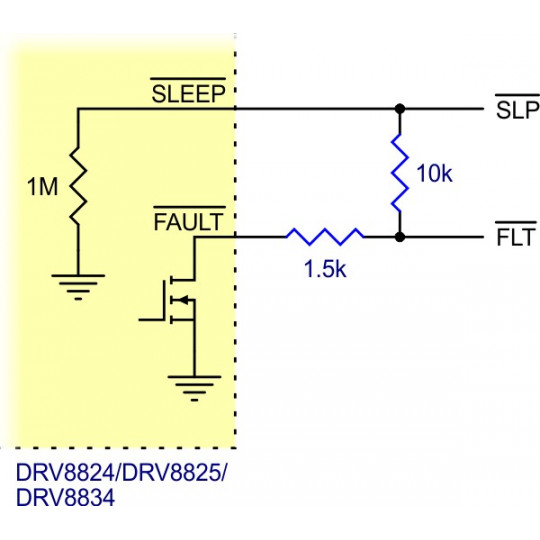
Система имеет два дополнительных входа для управления энергопотреблением: SLEEP и ENBL; их описание можно найти в документации. Обратите внимание, что оба вывода по умолчанию находятся в низком состоянии. Для включения системы вывод SLEEP должен быть подтянут к напряжению питания — логическому напряжению (в диапазоне 2,5–5,5 В). SLEEP также может быть подключен к микроконтроллеру для динамического управления состоянием системы.
Контроллер DRV8834 также имеет вывод, обозначенный как FAULT. Низкое состояние (логический ноль) указывает на неисправность в системе, например, на срабатывание защитного устройства. На плате этот вывод соединен с выводом SLEEP, поэтому подача высокого состояния на вывод SLEEP также подтягивает FAULT к VCC. Используя последовательный защитный резистор, вывод FAULT также можно подключить к VCC, что делает модуль совместимым по выводам с версией A4988.
DRV8834 Низковольтный драйвер шагового двигателя 10,8 В 2 А
Блок питания контроллера DRV8834
Система может питаться от напряжения от 2,5 В до 10,5 В, подаваемого между контактами VMOT (+) и GND (-). Напряжение следует фильтровать с помощью внешнего конденсатора, расположенного как можно ближе к плате контроллера. Его емкость зависит от максимального тока, потребляемого двигателем.
Внимание! При определенных условиях даже относительно низкое напряжение питания может вызывать скачки высокой амплитуды, превышающие допустимые 45 В. Такая ситуация приводит к необратимому повреждению схемы. Один из способов избежать этой проблемы — разместить конденсатор (не менее 47 мкФ) как можно ближе к выводам VMOT и GND модуля драйвера.
Подключение и отключение двигателя при включенном контроллере может повредить систему! |
Разрешение
Микрошаговый контроллер, такой как DRV8834, позволяет двигателю работать с высоким разрешением до 1/32 шага. Размер шага выбирается с помощью входов M0 и M1 — доступные режимы показаны в таблице ниже. По умолчанию вывод M1 внутренне подтянут к земле (через резистор 200 кОм). Вход M0 не подключен (плавающий режим). Если оба вывода не подключены, выбирается режим работы с шагом в 1/4 шага.
| РЕЖИМ 0 | РЕЖИМ 1 | РАЗРЕШЕНИЕ |
| Низкий | Низкий | Полный шаг |
| Высокий | Низкий | 1/2 шага |
| Плавающий | Низкий | 1/4 шага |
| Низкий | Высокий | шаг 1/8 |
| Высокий | Высокий | шаг 1/16 |
| Плавающий | Высокий | шаг 1/32 |
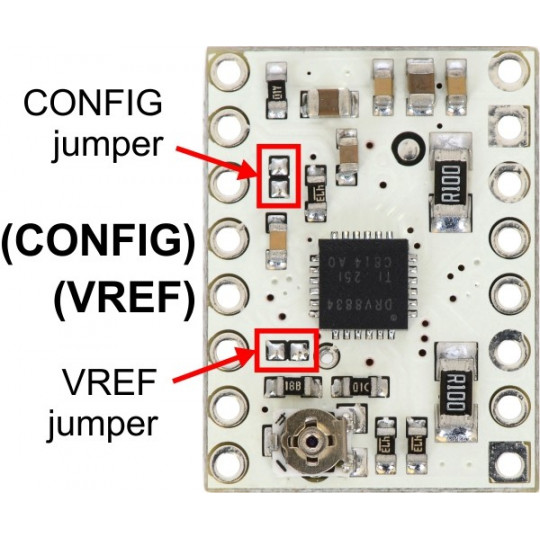
Дополнительная конфигурация
Контакт CONFIG позволяет изменить режим работы контроллера. Переключение в фазовый/разрешающий режим позволяет управлять двумя коллекторными двигателями постоянного тока. Для изменения режима также необходимо установить перемычки, как показано на рисунке ниже.
Тепловыделение
Плата спроектирована так, чтобы рассеивать тепло при постоянном потреблении тока примерно 1,5 А на катушку. Система способна обеспечить мгновенный ток до 2,2 А, но температурная защита отключает систему при токе примерно 2 А. Если ток значительно выше, следует использовать внешний радиатор, который можно смонтировать с помощью теплопроводящего клея.
Текущий предел
Для поддержания высокой скорости переключения ступеней можно использовать напряжение питания двигателя выше номинального. Вам просто нужно ограничить максимальный ток через катушки до каталожного значения двигателя.
Модуль позволяет активно ограничивать ток с помощью потенциометра. Одним из способов введения ограничения является установка контроллера в полношаговый режим и измерение тока, протекающего через одну катушку, без подачи сигнала на вход STEP. Измеренный ток составляет 70 % от установленного предела (обе катушки всегда включены и ограничены 70 % в полношаговом режиме).
Другой способ — измерить напряжение на выводе REF (обозначен кружком на печатной плате) и рассчитать ограничение тока (измерительные резисторы имеют номинал 0,1 Ом). Предел тока можно рассчитать по формуле:
Предел тока = VREF × 2
Например, если двигатель может потреблять максимум 1 А, опорное напряжение на выводе VREF должно составлять 0,5 В.
Схема модуля
Система содержит необходимые пассивные компоненты для правильной работы.контроллер. Схема подключения представлена на рисунках ниже.
Основные отличия от версии A4888
Модуль DRV8834 разработан для совместимости с версией на базе чипа A4988. Платы имеют одинаковую форму, размер и расположение контактов. Однако между ними есть несколько различий:
- Вывод, используемый для питания логики A4988, был заменен выводом FAULT, поскольку DRV8834 не требует дополнительного источника питания. Вывод FAULT подключен через защитный резистор, поэтому его можно успешно использовать в системах, разработанных для модуля A4988, где на этот вывод будет подаваться напряжение питания логики (от 2,2 В до 5,5 В).
- В модуле DRV8825 вывод SLEEP по умолчанию не подтянут к напряжению питания; он соединен с выводом FAULT через резистор 10 кОм. В системах, разработанных для A4988, резистор 10 кОм подтягивает вывод SLEEP к напряжению питания через напряжение питания логической части, подключенной к выводу FAULT, устанавливая состояние в высокий уровень.
- Потенциометр, ограничивающий максимальный ток для двигателей, расположен в другом месте.
- Модель DRV8834 позволяет работать в режиме с шагом 1/32, в то время как модель A4988 работала с шагом до 1/16.
- Время, необходимое для выполнения одного импульса, составляет 1,9 мкс, тогда как микросхеме A4988 требуется 1 мкс.
- Микросхема DRV8834 позволяет работать с более низкими напряжениями питания — в диапазоне от 2,5 В до 10,8 В.
- Микросхема DRV8834 способна выдавать больший ток, чем A4988, без дополнительного охлаждения (1,5 А, пиковый ток 2 А).
- Контакты имеют разные названия, но выполняют одну и ту же функцию.
Минимальное подключение контроллера — соединения аналогичны тем, что используются в модуле A4988.
Технические характеристики контроллера двигателя DRV8834
- Напряжение питания: 2,5 В - 10,8 В
- Постоянный ток на катушку: 1,5 А
- Максимальный мгновенный ток на катушку: 2 А
- Напряжение питания логических компонентов: 2,5 В - 5,5 В
- Режимы работы: 1, 1/2, 1/4, 1/8, 1/16 и 1/32 шага.
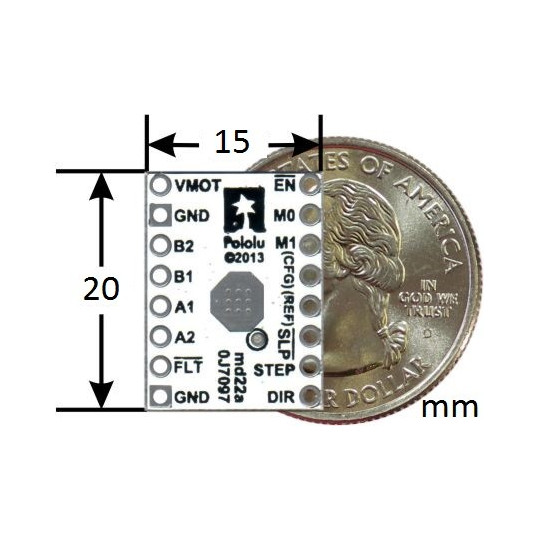
- Размеры: 20 x 15 мм
- Вес: 1,6 г (без разъемов)

| Пользовательские характеристики | |
|---|---|
| Вес упаковки | 0,003 кг |
| Высота упаковки | 0,5 см |
| Ширина упаковки | 7,5 см |
| глубина упаковки | 8,5 см |
| Основные | |
| Тип двигателя | Коллекторный |
- Цена: 862 ₴